VEX Team – 295S

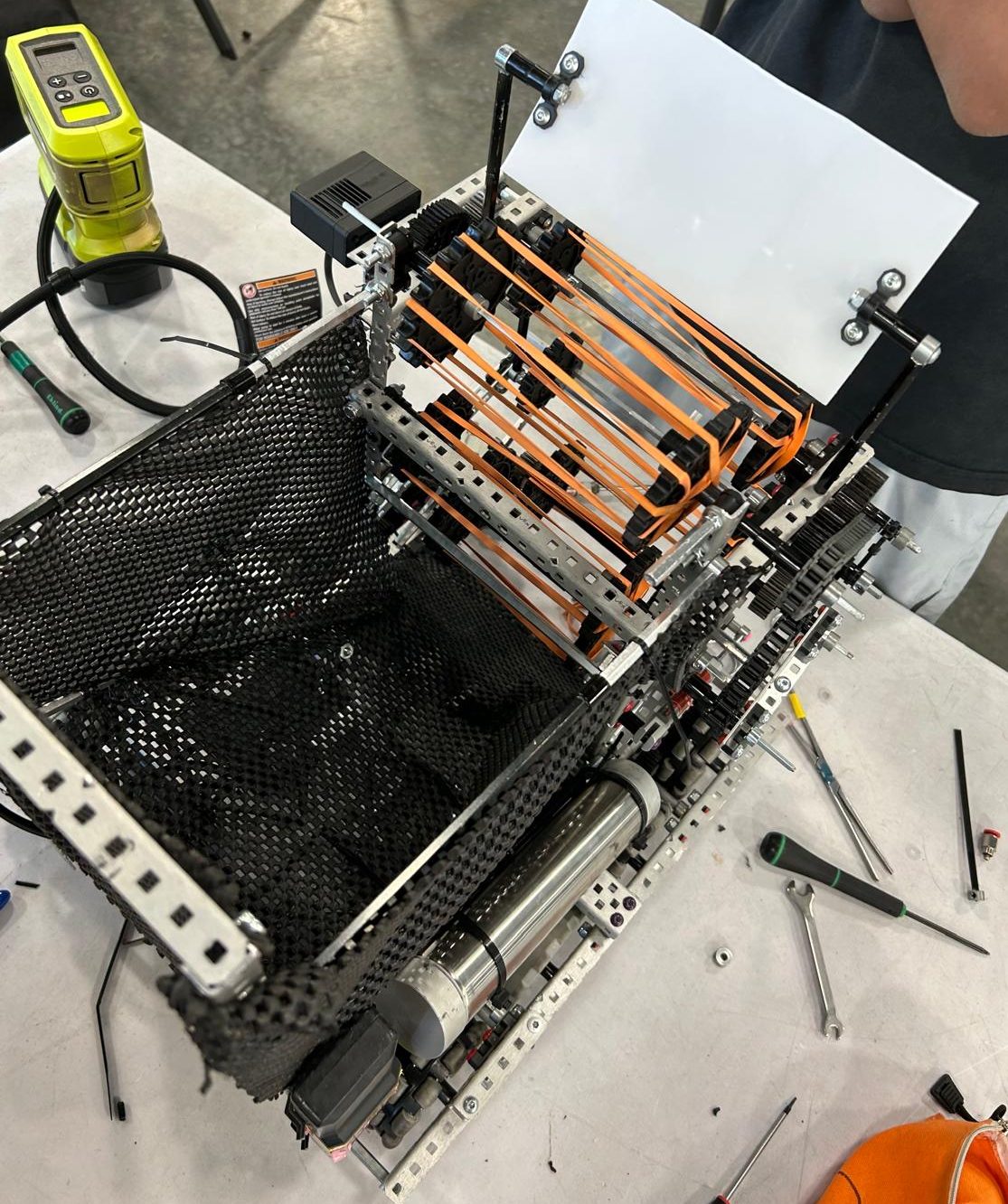
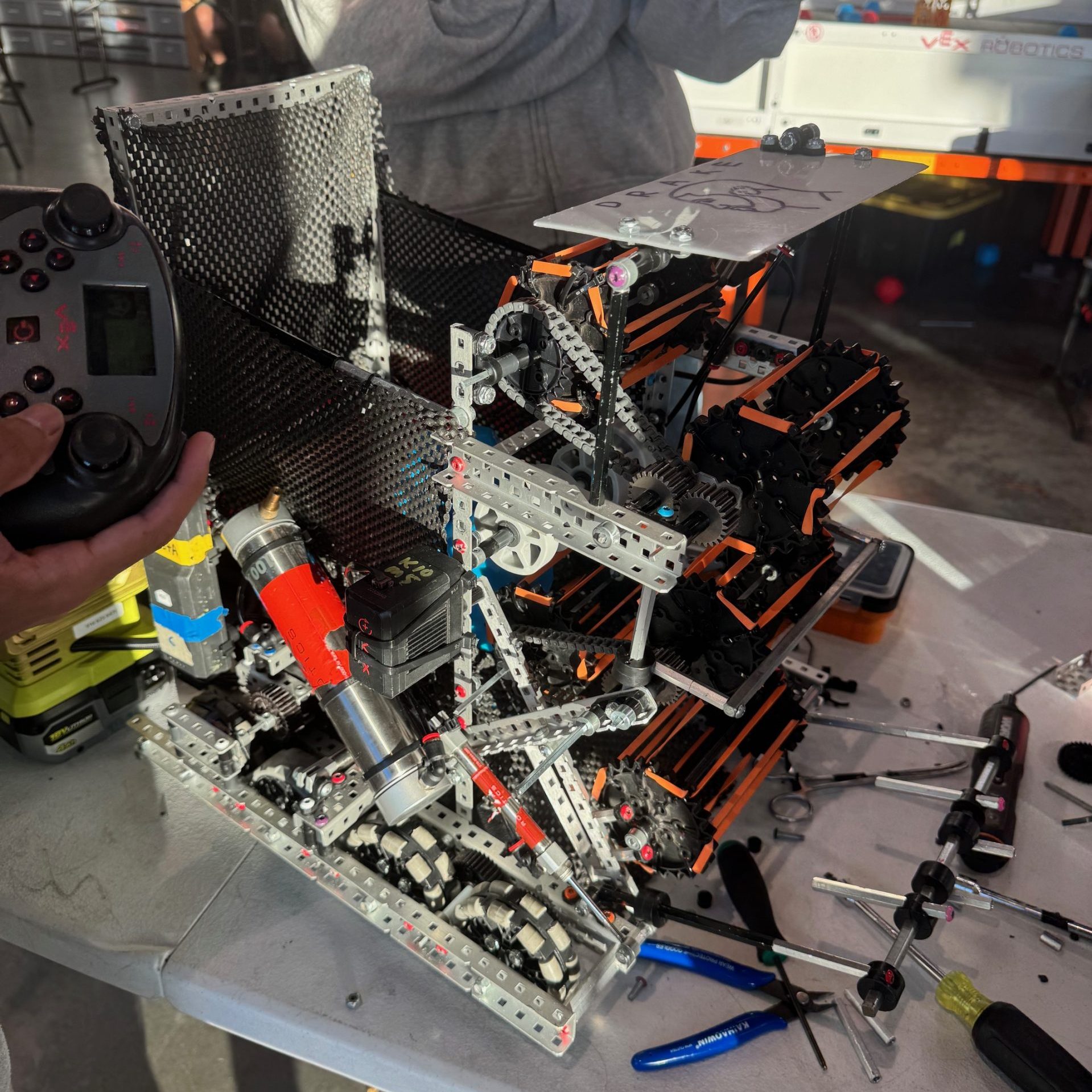
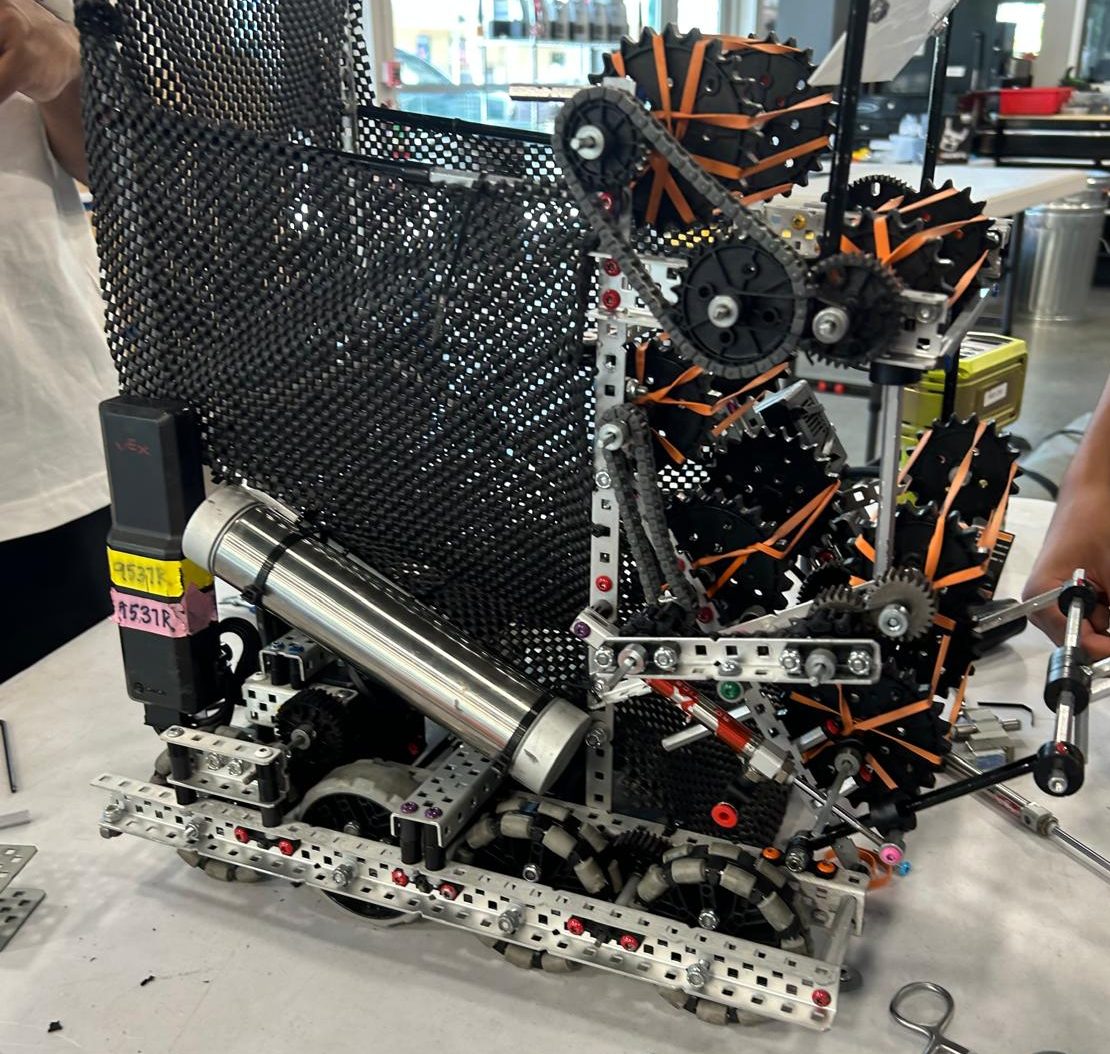
The VEX team is composed of five dedicated members who work together to design, build, and operate their competition robot. Sriram Vempati and Shreyan Boothpur, the designers, take the lead in brainstorming and sketching concepts, analyzing the game manual, and creating strategic design plans using onshapre CAD software. They build prototypes, refine the robot’s structure, and ensure the mechanical system is both durable and efficient.
Once the design is in place, Rahul Velur and Rivan Mandot, the coders, bring the robot to life. They program autonomous routines, integrate sensors, and develop responsive driver controls. Their role is critical in fine-tuning the robot’s performance, ensuring it can adapt to both autonomous and driver-controlled portions of the competition.
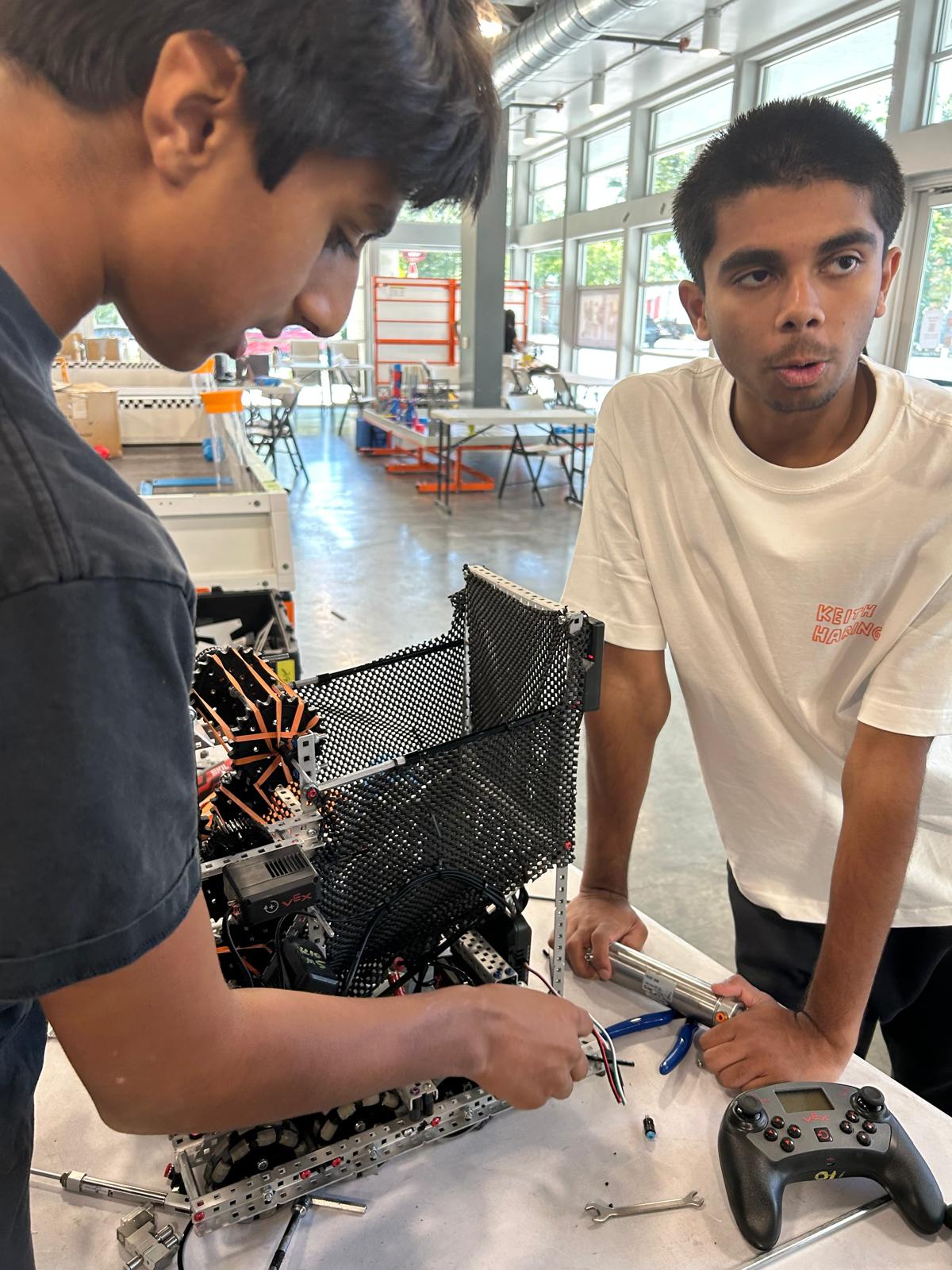
Finally, Arjun Dhulipala, the driver, serves as the on-field strategist and operator. Arjun works closely with both designers and coders to test the robot, provide feedback on handling, and practice driving skills to ensure smooth execution during matches.
Together, the team functions as a cohesive unit—designing, building, programming, and driving a robot that represents their creativity, technical skills, and teamwork.
Introduction to VEX V5
VEX V5 is a STEM learning system developed by VEX Robotics and the REC Foundation to help middle and high school students strengthen problem-solving and computational thinking skills. The program uses the VEX V5 Construction and Control System as a standardized platform for hardware, firmware, and software, enabling robotics teams and clubs to design, build, and program robots for the annual VEX V5 Robotics Competition.
The VEX V5 Construction and Control System is a versatile, metal-based robotics platform featuring bolt-together components and a programmable processor called the VEX V5 Brain. The Brain includes a touchscreen, multiple hardware and sensor ports, wireless capability, and connects with the VEX V5 Controller for real-time operation. Robots are powered by VEX V5 Motors with programmable speed and interchangeable gear cartridges, allowing for customizable performance. Programming is done through VEXcode V5, a Scratch-based environment that transitions smoothly into C++, designed for competition-level control and an industry-relevant experience.